Lec 19: Cameras, Lenes and Light Fields
Field of View (FOV)
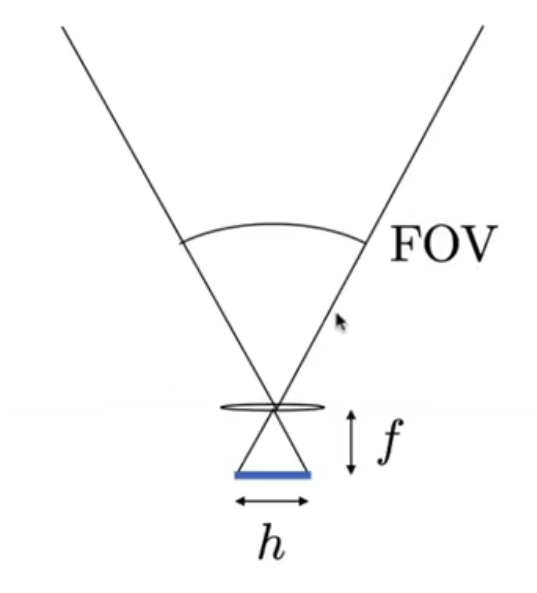
如图,给定
- 传感器的尺寸
- 焦距
就可以算出 SOV:\(SOV = 2 \arctan{\left(\frac h {2f}\right)}\)
Focal Length
按惯例,给定传统的 35mm-format film (36 x 24mm),SOV 和焦距就可以一一对应:
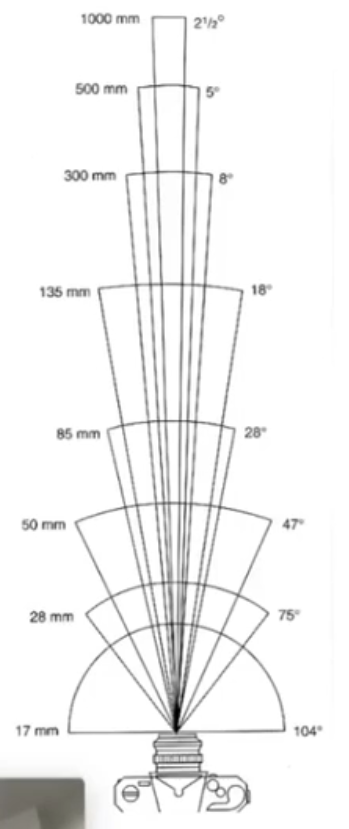
因此,给定(标准尺寸下的)SOV,就能换算出焦距。
不过,相同焦距,尺寸越大,SOV 就越大。
Exposure
曝光 \(H = T \times E\),也就是 Exposure = Irradiance x Time
- 除此之外,还有一个 ISO。可以认为是后期处理,也就是放大
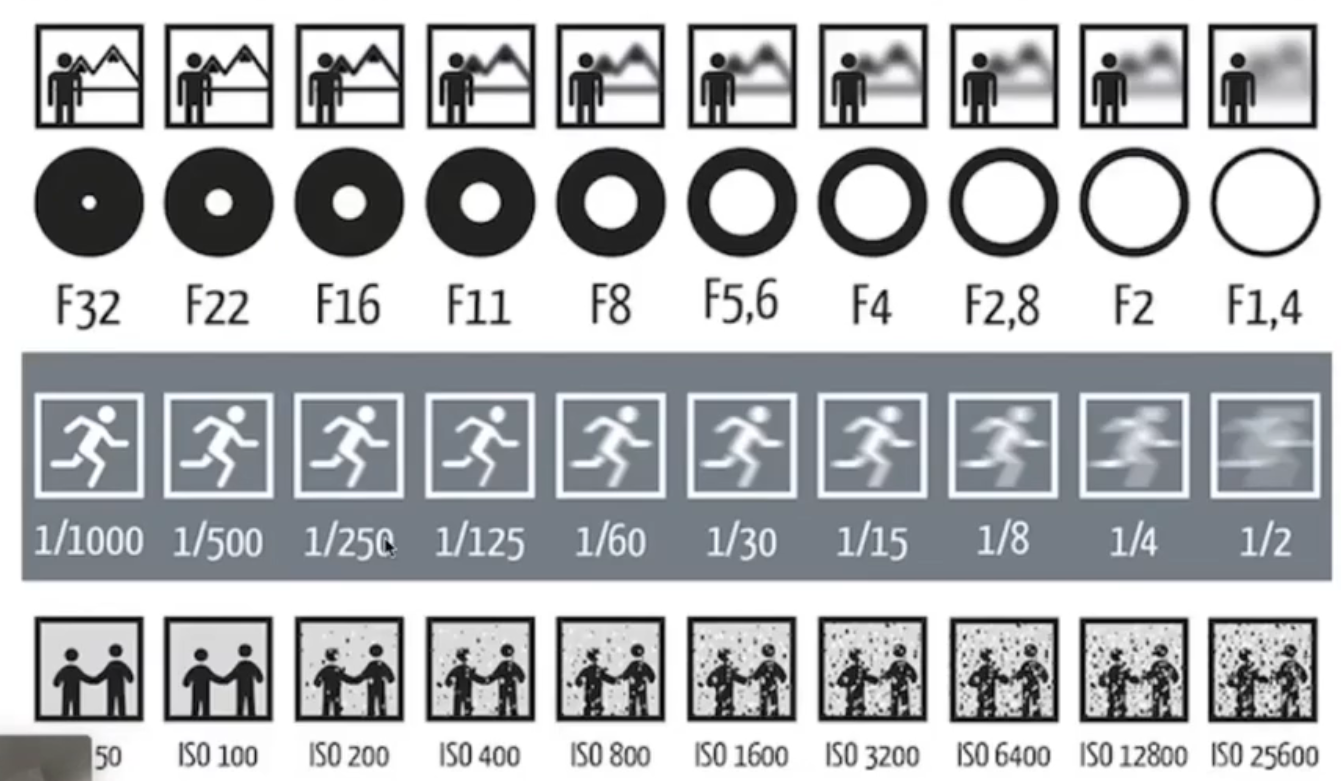
如图,
- 光圈越大(i.e. 直径越小),背景越锐利
- 曝光时间越长,越虚+越亮
- ISO 越大,越亮+绝对噪声越大
Circle of Confusion
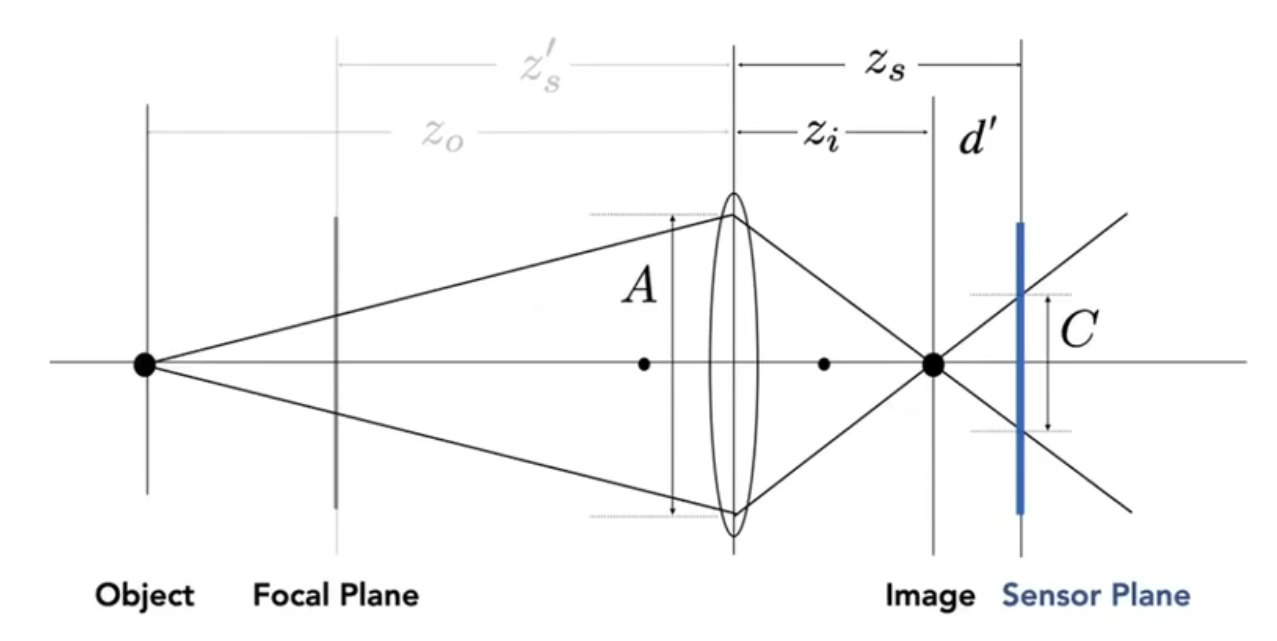
如图,给定
- 物距
- 焦距
- 像距
由 $$ \frac 1 {z_o} + \frac 1 {z_i} = \frac 1 {z_s'} $$ 我们就可以求出 circle of confusion 的相对大小 $$ \frac C A = \frac {d'} {z_i} = \frac {z_s - z_i} {z_i} = \abs{z_s - z_i} (\frac 1 {z_o} - \frac 1 {z_s'}) $$ 对于固定的 \(z_s, z_o, z_s'\),\(A\) 越小,\(C\) 就越小,从而 \(z_o\) 的变化范围可以更大一些,也就是景深更大。
Depth of Field
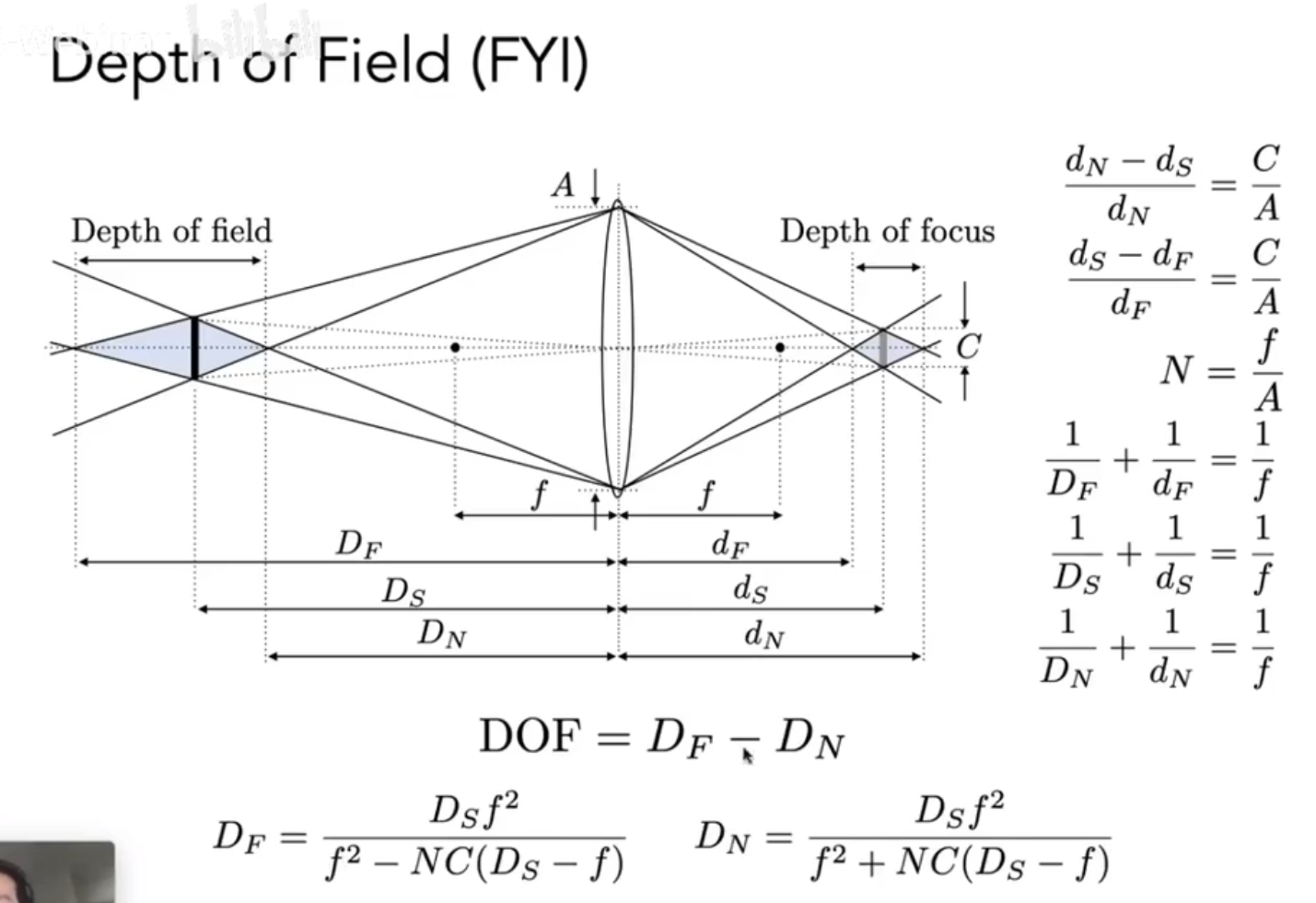
如图,在镜头、场景固定的情况下,景深取决于 \(C\) 的最大值。我们通过这些量求出 \(D_F\) 和 \(D_N\),从而求出景深。
Light Field/Lumigraph(光场)
全光函数
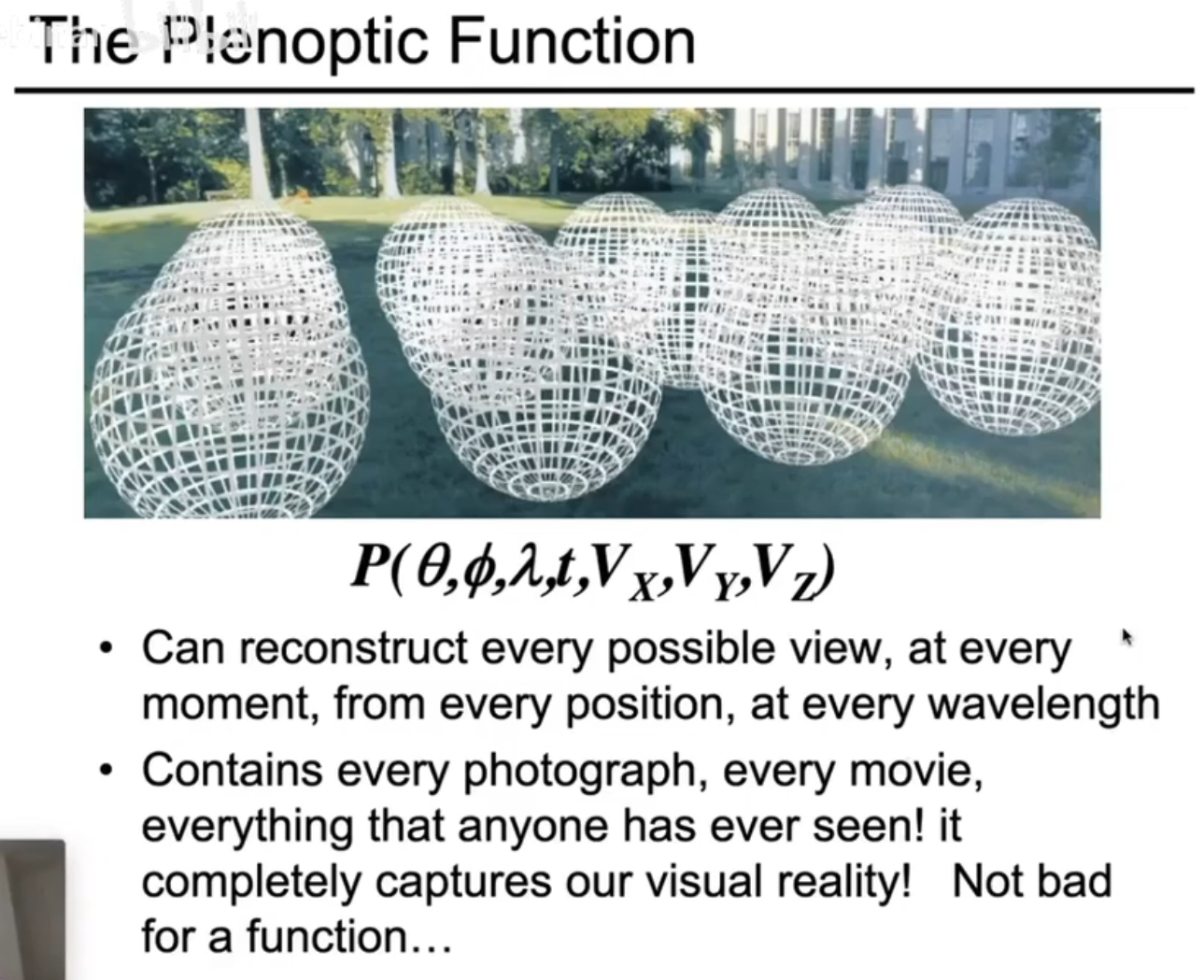
如图,如果我们记录
- 所有位置(i.e. \((V_x, V_y, V_z)\))
- 所有方向(i.e. \((\theta, \phi)\))
- 所有波长(i.e. \(\lambda\))
- 在所有时刻(i.e. \(t\))
sensor 接受的 intensity,那么,这就可以完整描述我们的 visual reality。
4D 光场和 Lumigraph
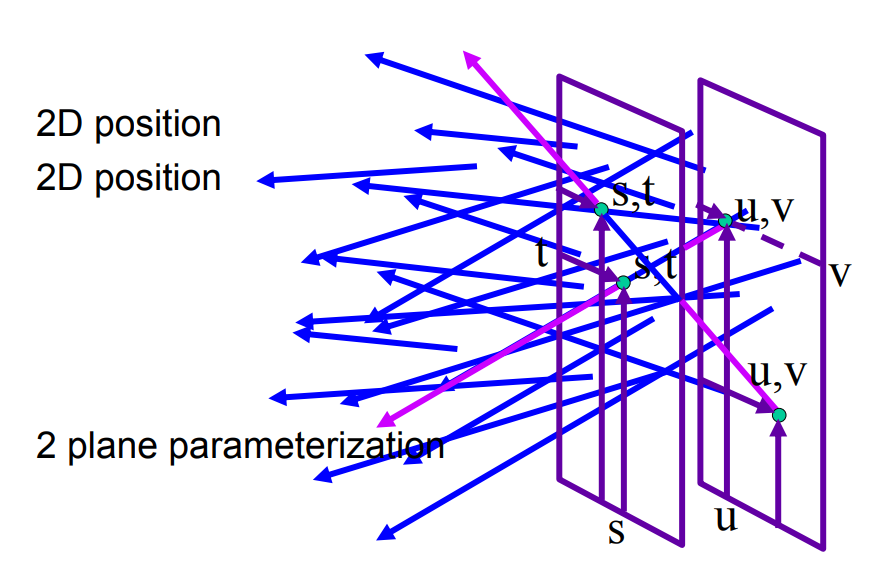
我们不妨将光场中的 \(t\) 和 \(\lambda\) 去除,并且只关心某一个平面上的光场,从而,我们只需要
- 所有位置(i.e. \((V_x, V_y)\))
- 所有方向(i.e. \((\theta, \phi)\))
也就是 4 维。
进一步,我们不妨利用两个相互平行的平面来进行参数化(如下图),从而更加 practical。
例子
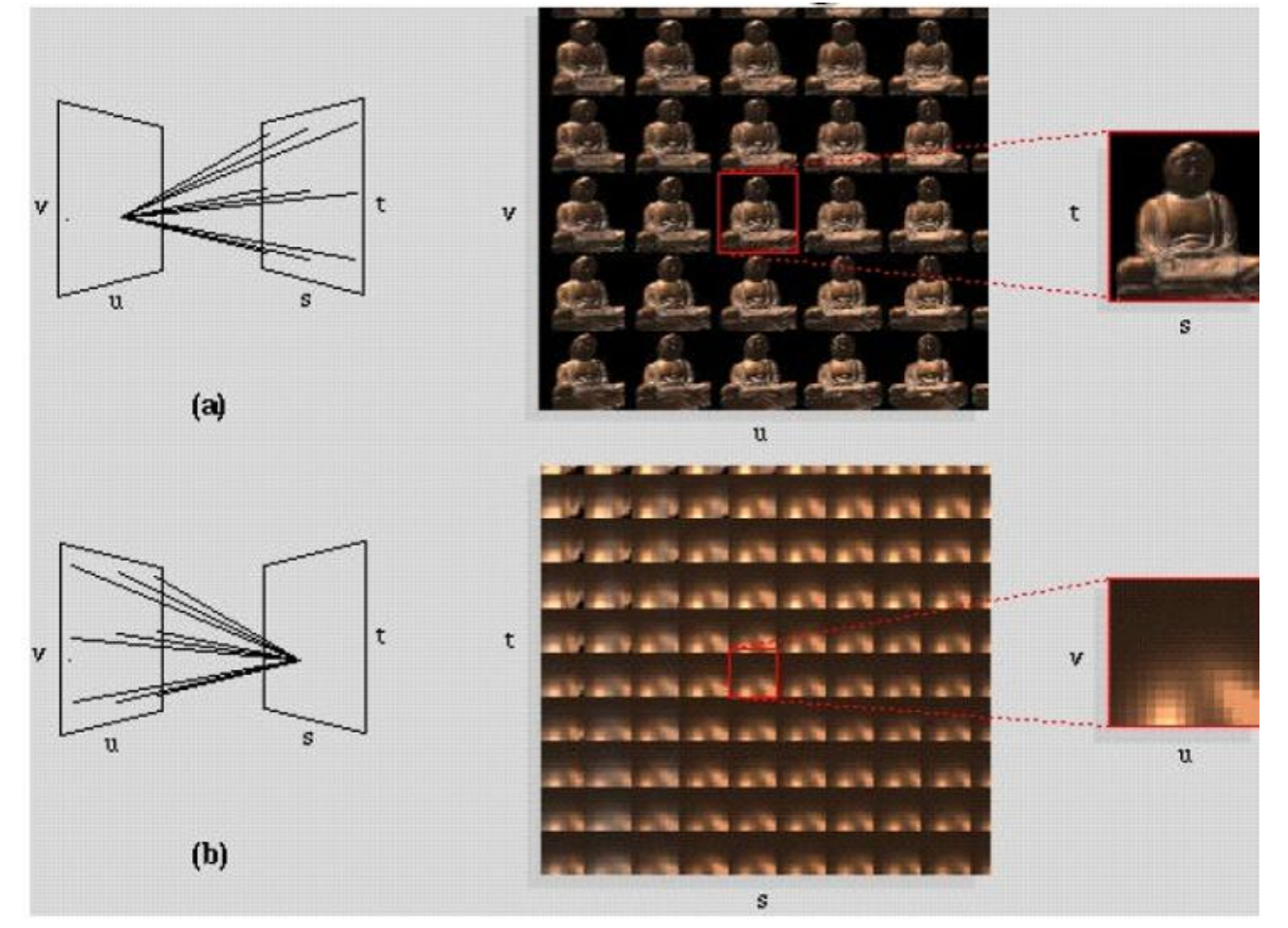
如图,
- 从 u-v 平面看向 s-t 平面,每个 u-v 平面的像素都记录了从 s-t 平面各个像素发出的光(也就是 u-v 平面的像素记录了各个方向的光)。
- u-v 平面上,像素点 \((u_0, v_0)\) 记录的图片可以理解为函数 \(i_{u_0, v_0} (s,t) = f(u_0, v_0, s,t)\)
- 从 s-t 平面看向 u-v 平面,每个 s-t 平面的像素记录了应该往 u-v 平面各像素发出的光。
- s-t 平面上,像素点 \((s_0, t_0)\) 记录的图片可以理解为函数 \(j_{s_0, t_0} (u,v) = f(u, v, s_0, t_0)\)
因此,使用照相机阵列,我们可以获取各个 \(i_{u_0, v_0}(s,t)\),进而可以转换成各个 \(j_{s_0, t_0} (u,v)\),用作之后的显示。
光场照相机
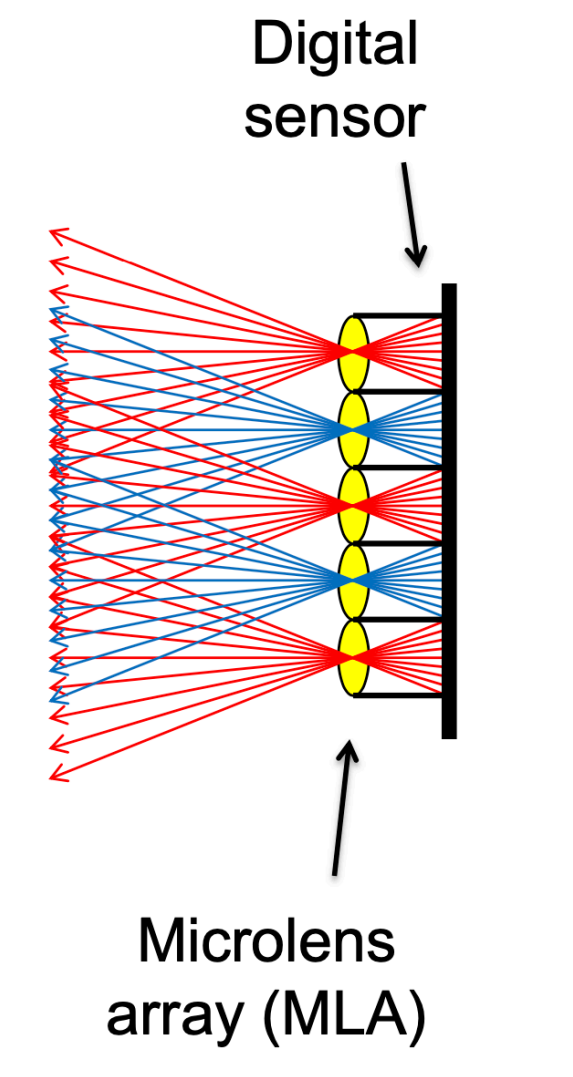
如图,原本的一个像素接受到的就是 irradiance(i.e. 所有方向上光的加权平均)。 我们现在将这个(父)像素“拆开”成若干子像素,从而每个子像素记录了父像素的某个方向上的 radiance。
从而,我们可以获取各个 \((u_0, v_0)\) 的 \(i_{u_0, v_0}(s,t)\)。
这样,我们可以利用这个细节丰富的图像(也就是上面例子中的图 (a)),还原出 \(f(u,v,s,t)\),从而在后期进行任意的调位置、调焦、调光圈操作。
例子
如果我们希望获得针孔摄像机+斜下方的视角,我们只需选取所有斜向上的光线即可。
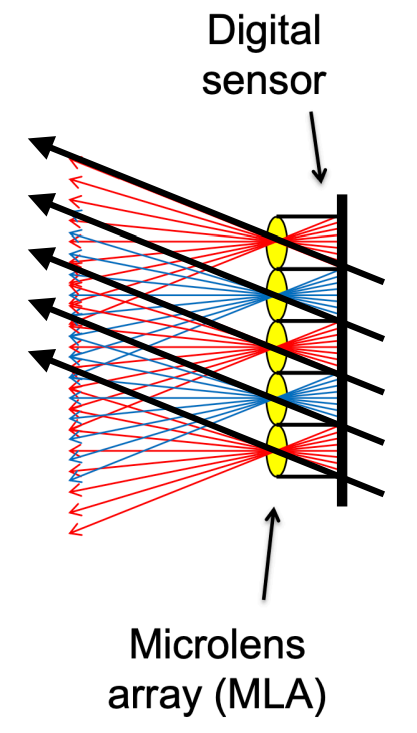
对于其它位置,同理。
对于调焦、光圈,我们只需要计算出底片上每个像素接收到的光线(利用 \((u,v,s,t)\) 参数化),然后把 \(f(u,v,s,t)\) 加权平均即可。
In all, all these functionalities are available because
- The light field contains everything
Any problems to light field cameras?
- Insufficient spatial resolution (same film used for both spatial and directional information)
- High cost (intricate designation of microlenses)
- But anyway, Computer Graphics is about trade-offs