Lec 14: Exceptional Control Flow - Exceptions and Processes
The Control Flow
Up to now, we have learnt two mechanisms for changing the control flow:
- (unconditional) jumps and (conditional) branches
- call and return
which react to changes in program state.
But, these are insufficient to systems, which have to handle changes in system state:
- Data arrives from disks or network adapters
- Instruction divides by zero
- User hits ctrl-c at the keyboard
- System timer expires
- ...
These are exceptional control flows, which are outside normal control flows.
Exceptional Control Flow
- ECF exists in every level of a computer system.
- Low-level mechanisms
- Exceptions
- Change in control flow in response to a system event (i.e., change in system state)
- Implemented using a combination of hardware and OS software
- Higher-level mechanisms
- Process context switch
- Implemented by OS software and hardware timer
- Signals
- Implemented by OS software
- Nonlocal jumps:
setjmp()andlongjmp()- Implemented by C runtime library
Exceptions
An exception is a transfer of control to the OS kernel in response to some event (i.e.,change in processor state)
-
Kernel is the memory-resident part of the OS
-
Examples of events: Divide by 0, arithmetic, overflow, page fault, I/O request completes, typing Ctrl-C, ...
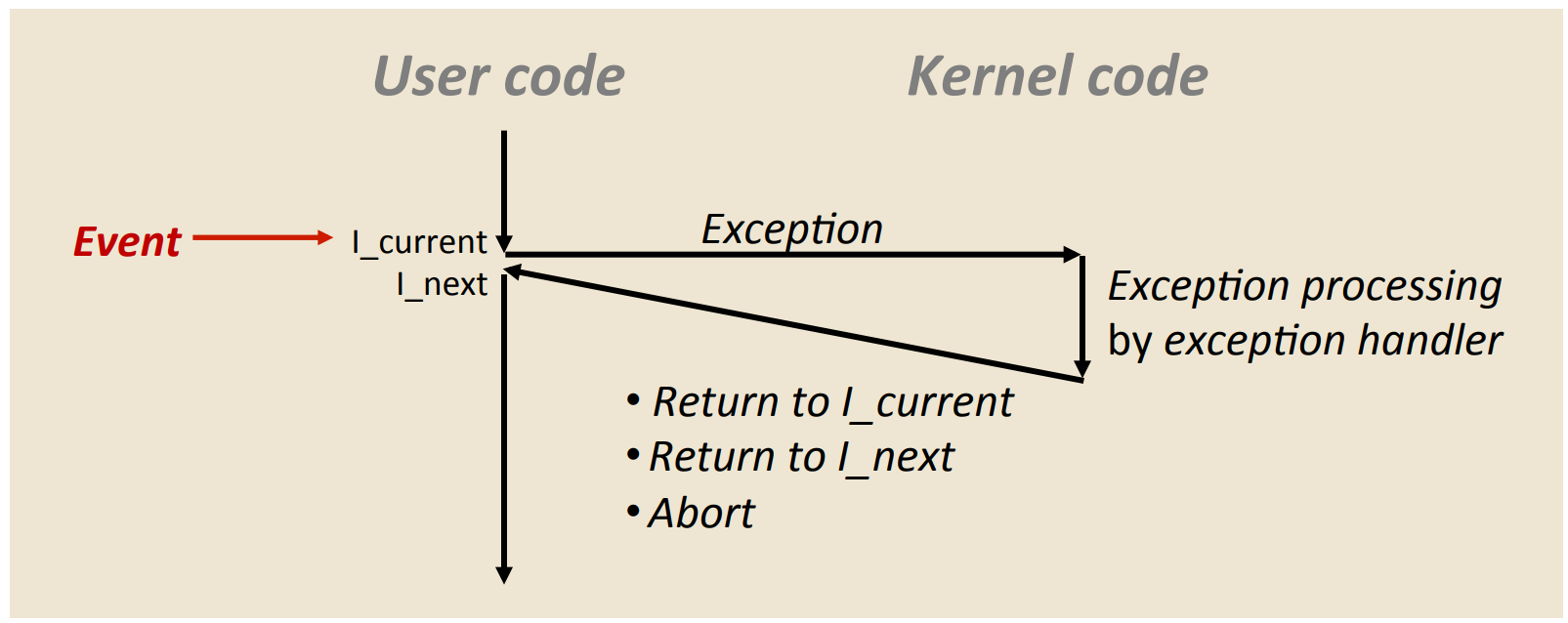
In this picture, it shows that there are 3 possibilities that might happen after the exception is processed
- Return to l_current
- e.g. page fault
- Return to l_next
- e.g. typing Ctrl-C
- Abort
- e.g. protection faults
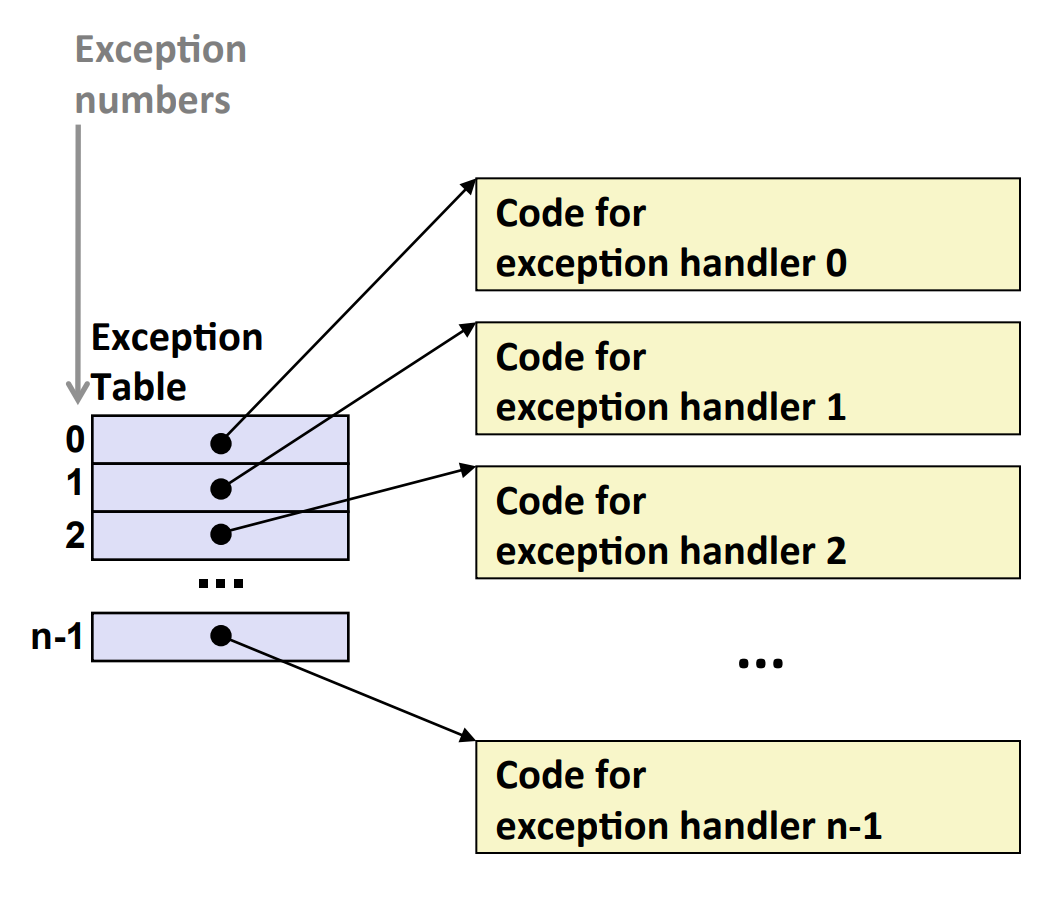
Exception Tables
Two Kinds of Exceptions
Asynchronous Exceptions (Interrupts)
Asynchronous exceptions happen as a result of changes in state that are occurred outside of the processor.
- it's indicated by setting the processor's interrupt pin
-
e.g. when disk controller finishes doing a direct memory access and copying data from disk to memory, it notifies the processor by setting the pin high
-
handler returns to "next" instruction
Example:
- Timer interrupt
- Every few milliseconds, an external timer chip triggers an interrupt
-
Used by kernel to take back control from user programs
- in case the user program is in a dead loop
-
I/O interrupt from external device
- Hitting Ctrl-C
- Arrival of a packet from a network
- Arrival of a data from the disk
- ...
Synchronous Exceptions
Synchronous exceptions are caused by events that occur as a result of executing an instruction:
-
Traps
-
Intentional
-
Examples: system calls, breakpoint traps, special instructions
-
system "call"s look like call, but what it actually does is transferring control to the kernel, and let the kernel do privileged operations
-
example:
-
-
returns to "next" instruction
-
Faults
-
Unintentional but possibly recoverable
- Examples: page faults(recoverable), protection faults (unrecoverable), floating point exceptions
-
Either re-executes faulting ("current") instruction or aborts
-
Aborts
-
Unintentional and unrecoverable
- Examples: illegal instruction, parity error, machine check
- Aborts current program
Processes
Definition: A process is an instance of running program (i.e. that is in execution)
Process provide each program with two key abstractions (or in another way, "illusions")
- Logical Control Flow
- Each program seems to have exclusive use of the CPU
- Provided by kernel mechanism called context switching
- Private Address Space
- Each program seems to have exclusive use of main memory
- Provided by kernel mechanism called virtual memory
Multiprocessing
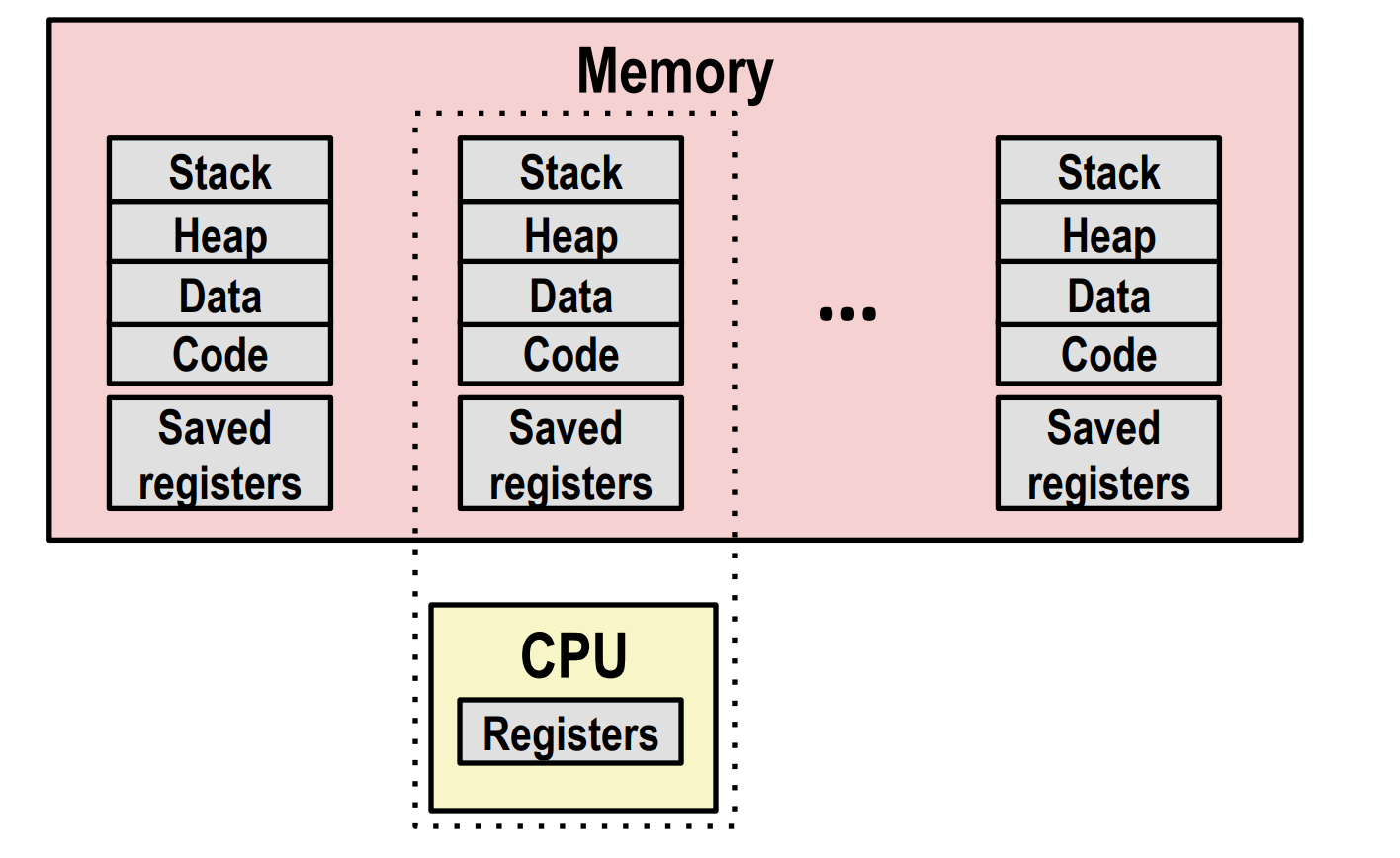
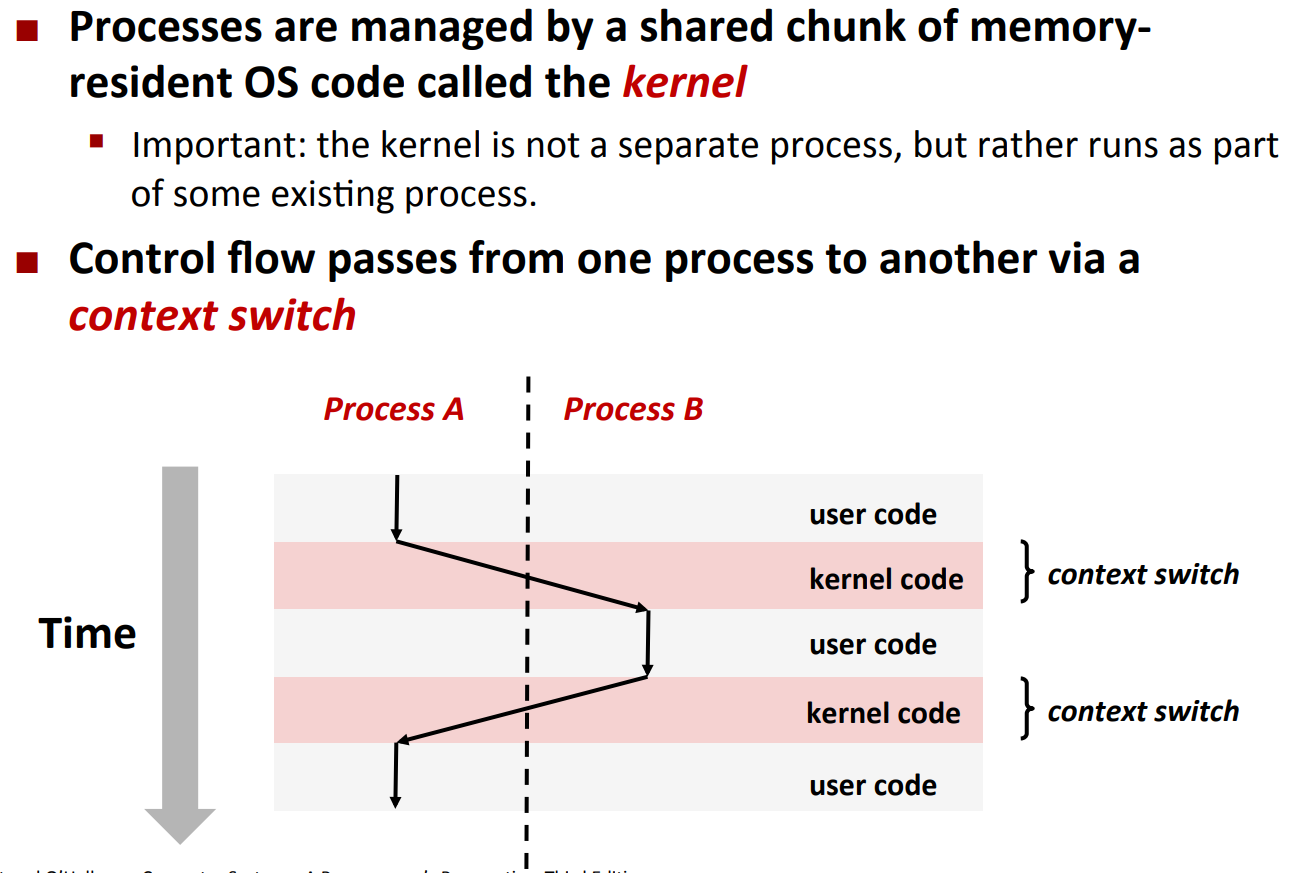
Once in a while, the kernel saves the registers in the CPU in the memory, load the saved registers from the next process, and proceed to run the next process. This is context switching.
For multi-core processor, several processes might be run concurrently. But if the number of processes outmatches the number of CPUs, the kernel still needs to do context switching.
Concurrent Processes
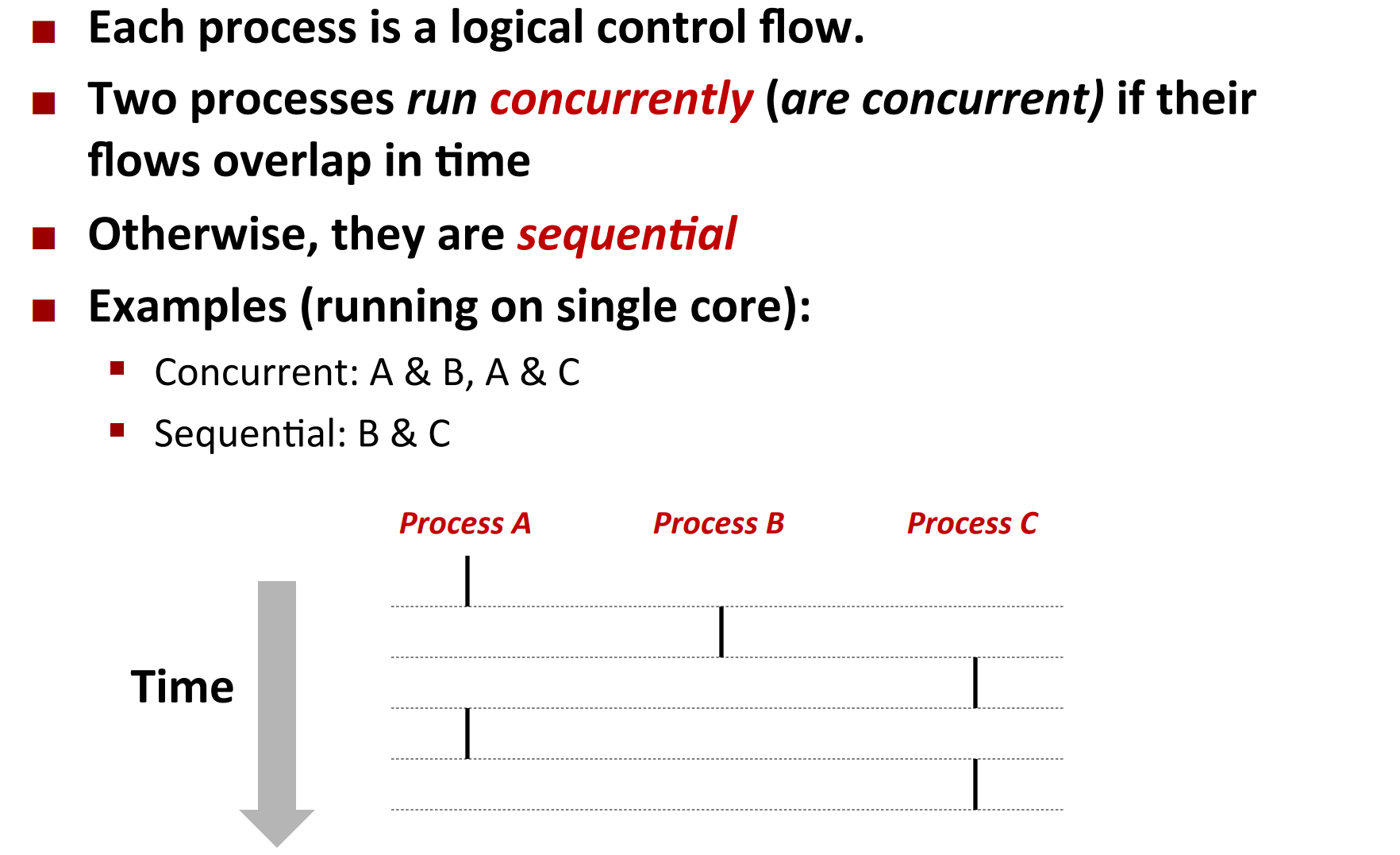
Note that concurrency might happen no matter how many CPU cores you have.
- Even if you only have one core, as long as the processes overlap in their logical control flow, they are concurrent.
Context Switching
Process Control
System Call Error Handling
On error, Linux system-level functions typically return -1 and set global variable errno to indicate cause.
Hard and fast rule:
- You must check the return status of every system-level function
- Only exception is the handful of functions that return void
Example:
You can further simplify it by wrappers.
void unix_error(char *msg) { /* Unix-style error */
fprintf(stderr, "%s: %s\n", msg, strerror(errno));
exit(0);
}
Creating and Terminating Processes
From a programmer’s perspective, we can think of a process as being in one of three states:
- Running
- Process is either executing, or waiting to be executed and will eventually be scheduled (i.e.,chosen to execute) by the kernel
- Stopped
- Process execution is suspended and will not be scheduled until further notice (next lecture when we study signals)
- Terminated
- Process is stopped permanently
Terminate Process
-
Process becomes terminated for one of three reasons:
-
Receiving a signal whose default action is to terminate (next lecture)
-
Returning from the main routine
-
Calling the
exitfunction -
void exit(int status) -
Terminates with an exit status of
status. -
Convention: normal return status is 0, nonzero on error.
-
Another way to explicitly set the exit status is to return an integer value from the main routine.
-
exitis called but never returns
Creating Process
We use fork() to create processes in C.
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <stdlib.h>
int main() {
int *ptr = malloc(sizeof(int));
*ptr = 0;
int x = 1;
pid_t pid = fork();
if (pid < 0) {
fprintf(stderr, "Fork failed\n");
return 1;
} else if (pid == 0) {
// Child process
printf("Hello from child process! Child PID == %d, *ptr == %d, x == %d\n", pid, (*ptr += 114514), ++x);
} else {
// Parent process
printf("Hello from parent process! Child PID == %d, *ptr == %d, x == %d\n", pid, (*ptr -= 1919810), --x);
}
return 0;
}
Output:
Hello from parent process! Child PID == 22307, *ptr == -1919810, x == 2
Hello from child process! Child PID == 0, *ptr == 114514, x == 0
可以看到,
- 两者的 PID 值不一样,说明
fork()返回了两次——在父进程返回子进程的 PID,在子进程返回 0 *ptr与x互不干扰,说明fork()确实建立了两个进程——把父进程的内存全部拷贝到子进程,当然也包括了 saved registers- Even more, child gets identical copies of the parent’s open file descriptors.
- The only difference between parent and child is their PIDs.
- 在 Github Codespaces 中,父进程先于子进程。但是,事实上,不同平台的顺序可能不同。并不存在一个 100% 确定的顺序关系。因此,don't make assumptions
Modeling fork with Process Graphs
// header files
// ...
int main()
{
pid_t pid;
int x = 1;
pid = Fork();
if (pid == 0) { /* Child */
printf("child : x=%d\n", ++x);
exit(0);
}
/* Parent */
printf("parent: x=%d\n", --x);
exit(0);
}
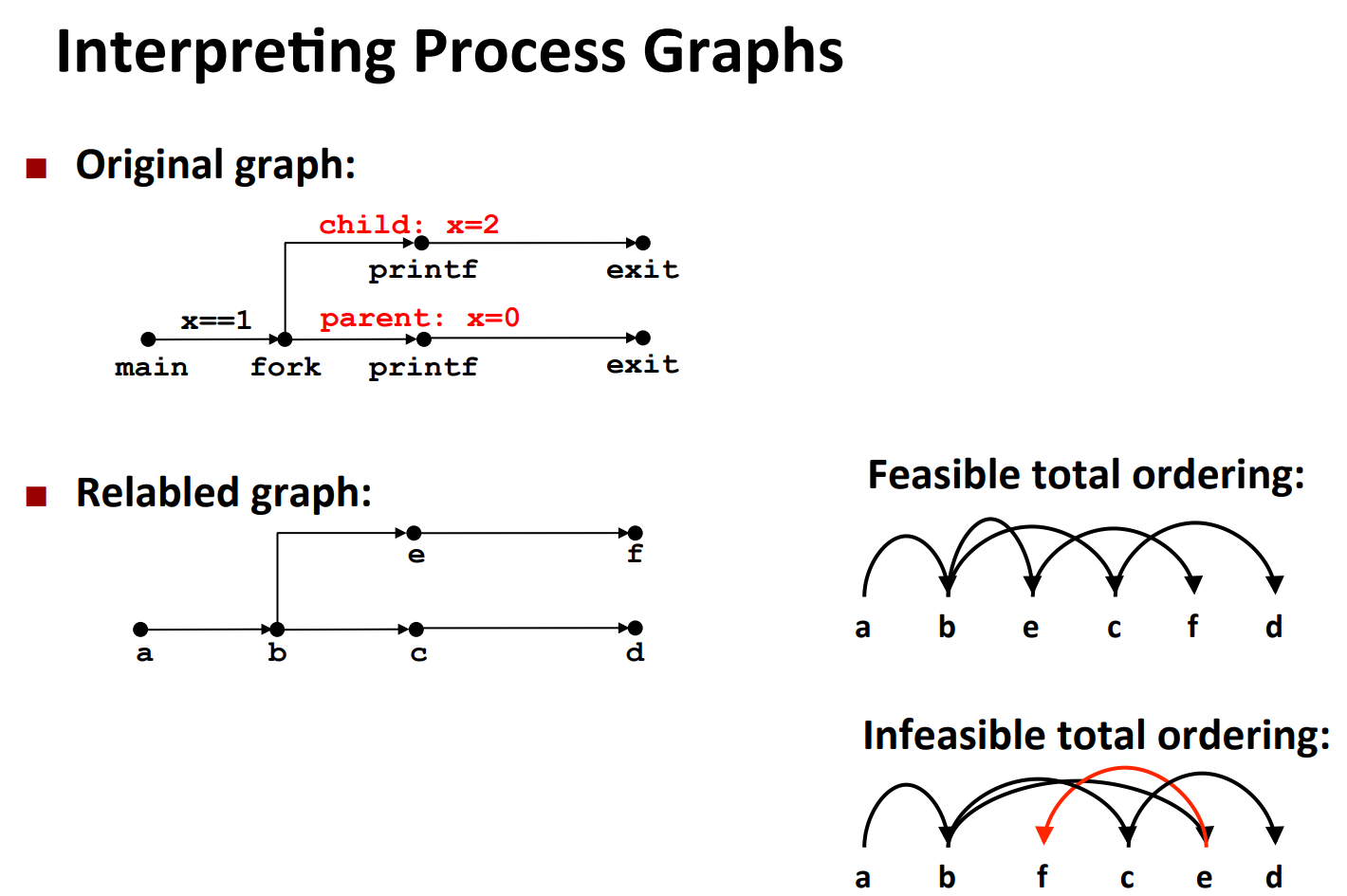
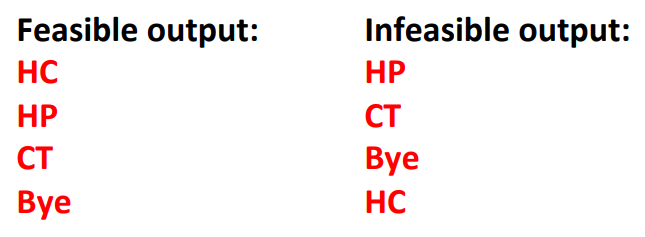
如图和上述代码,我们可以根据进程之间的关系,作出进程图,并进行拓扑排序。每一个 valid topological sort,都代表一个可能的执行顺序(i.e. feasible total ordering)。
More Examples of fork
假如我们设计以下 fork2() 函数:
那么,其进程图如下所示:
实际测试中,我看到了以下输出:
等等。不难发现,均属于可行的执行顺序。
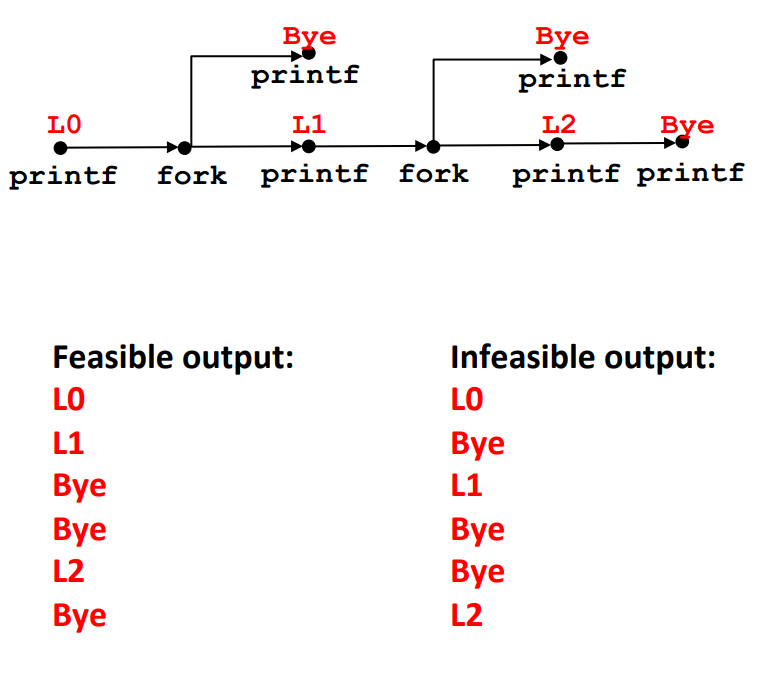
还有一个更复杂的代码(nested fork in parent):
void fork4() {
printf("L0\n");
if (fork() != 0) { /* if not child process */
printf("L1\n");
if (fork() != 0) { /* if not child process */
printf("L2\n");
}
}
printf("Bye\n");
}
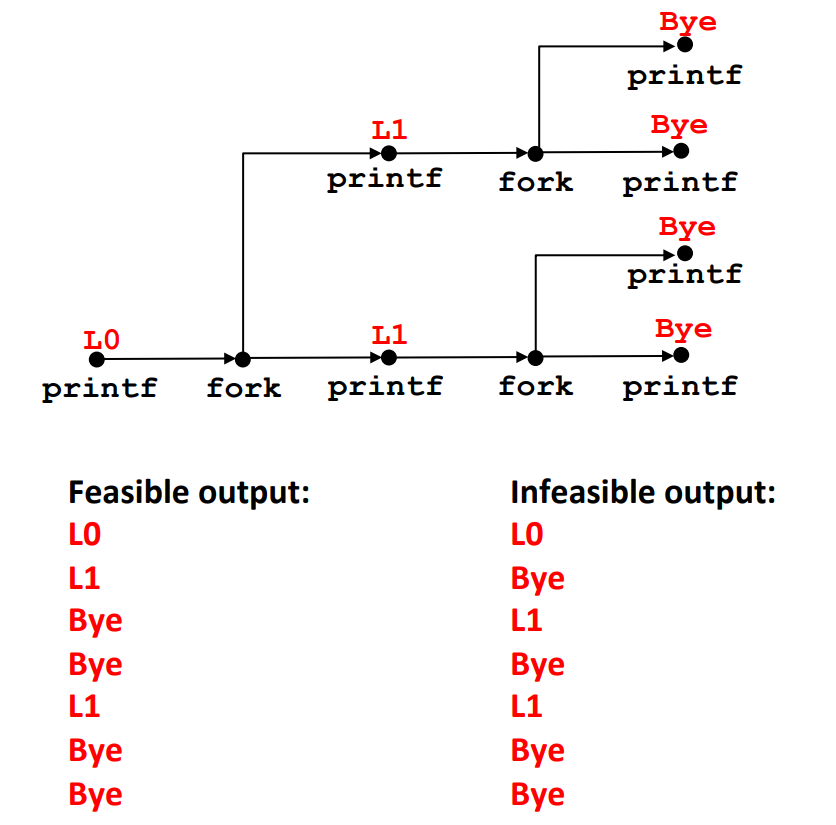
以及 nested fork in children:
void fork5()
{
printf("L0\n");
if (fork() == 0)
{
printf("L1\n");
if (fork() == 0)
{
printf("L2\n");
}
}
printf("Bye\n");
}
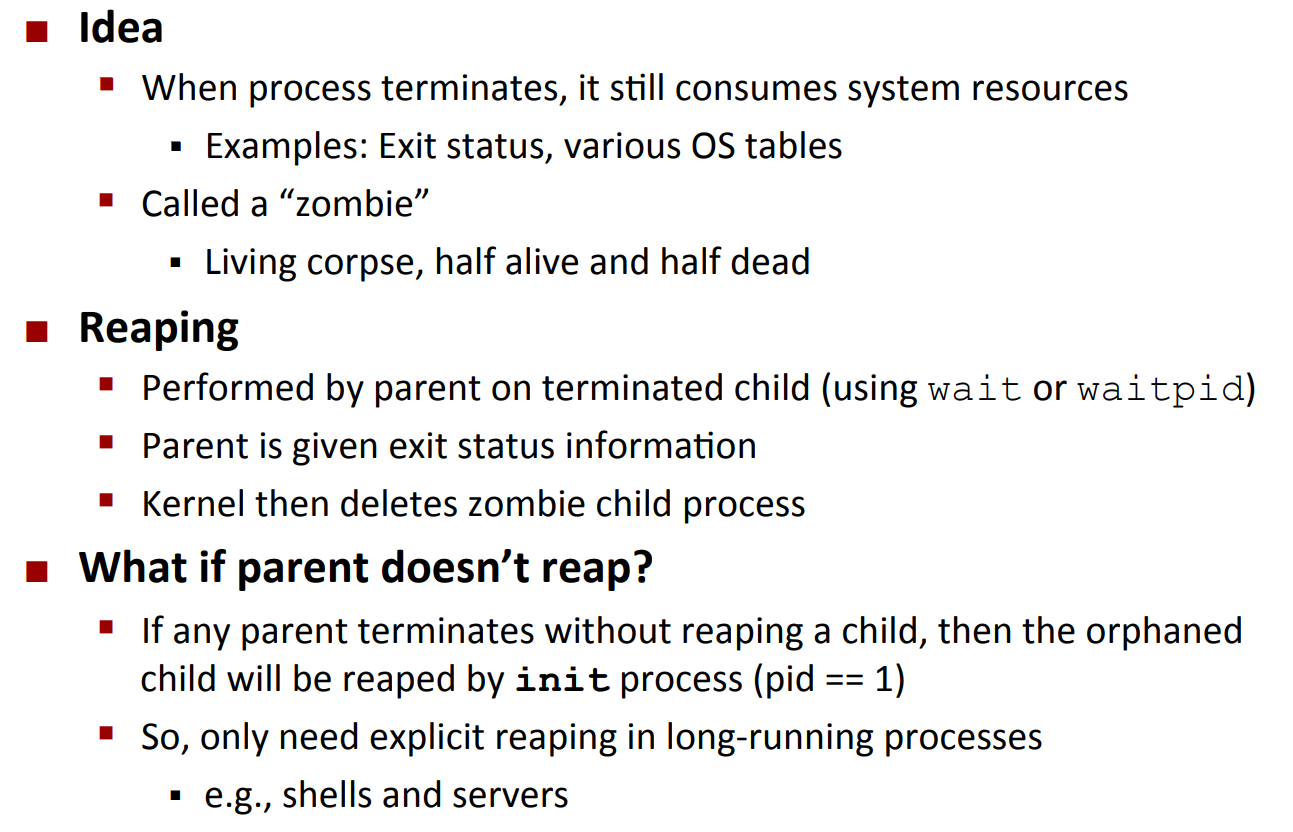
Reap Child Processes
Zombie Example
void fork7()
{
if (fork() == 0) {
printf("Terminating Child, PID = %d\n", getpid());
} else {
printf("Running Parent, PID = %d\n", getpid());
while (1);
}
}
Linux terminal output:
@MTDickens ➜ .../dev/csapp/lec14/fork (main) $ ./zombie &
[1] 38124
Running Parent, PID = 38124
Terminating Child, PID = 38126
@MTDickens ➜ .../dev/csapp/lec14/fork (main) $ ps
PID TTY TIME CMD
21742 pts/2 00:00:00 bash
38124 pts/2 00:00:01 zombie
38126 pts/2 00:00:00 zombie <defunct>
38153 pts/2 00:00:00 ps
@MTDickens ➜ .../dev/csapp/lec14/fork (main) $ kill 38124
[1]+ Terminated ./zombie
@MTDickens ➜ .../dev/csapp/lec14/fork (main) $ ps
PID TTY TIME CMD
21742 pts/2 00:00:00 bash
38226 pts/2 00:00:00 ps
As you can see, ps shows the child process, i.e. process 38126, as "defunct", meaning that it's currently a zombie.
wait: Synchronizing with Children
How to reap a children? By calling wait (or waitpid if you want to reap a child with specific PID).
Specification for wait:
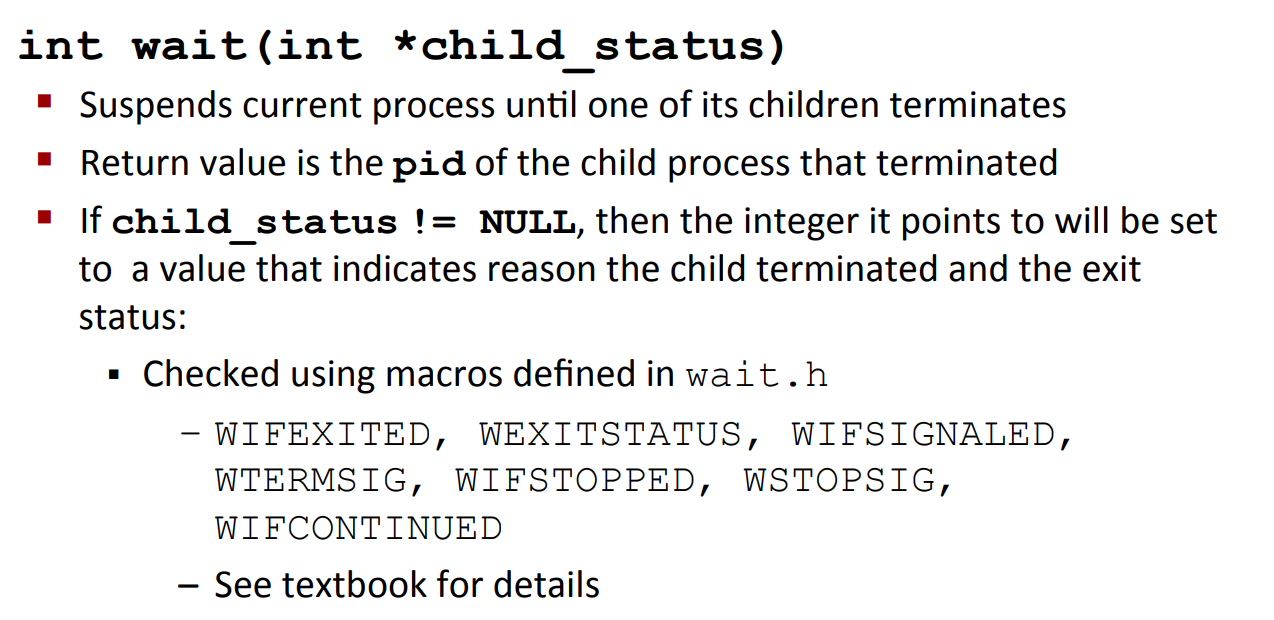
- Note: if you use
waitpidinstead ofwait, you can specify the wait
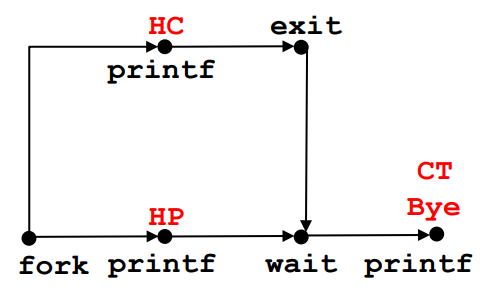
Code:
void fork9()
{
int child_status;
if (fork() == 0)
{
printf("HC: hello from child\n");
exit(0);
}
else
{
printf("HP: hello from parent\n");
wait(&child_status);
printf("CT: child has terminated\n");
}
printf("Bye\n");
}
Process Graph (you can see it actually becomes a DAG instead of a tree, after the parent gets synchronized with its children processes):
More code examples on GeekForGeeks.
Load and Running Processes
You can use int execve (char *filename, char *argv[], char *envp[]) to override this process with a new process specified by filename, argv and envp.
- it overwrites code, data and stack
- the PID remains unchanged, but the content of this process is completely changed
- as well as open files and signal context
- it is called once and never returns (if successful)
Structure of a Stack When a New Program Starts
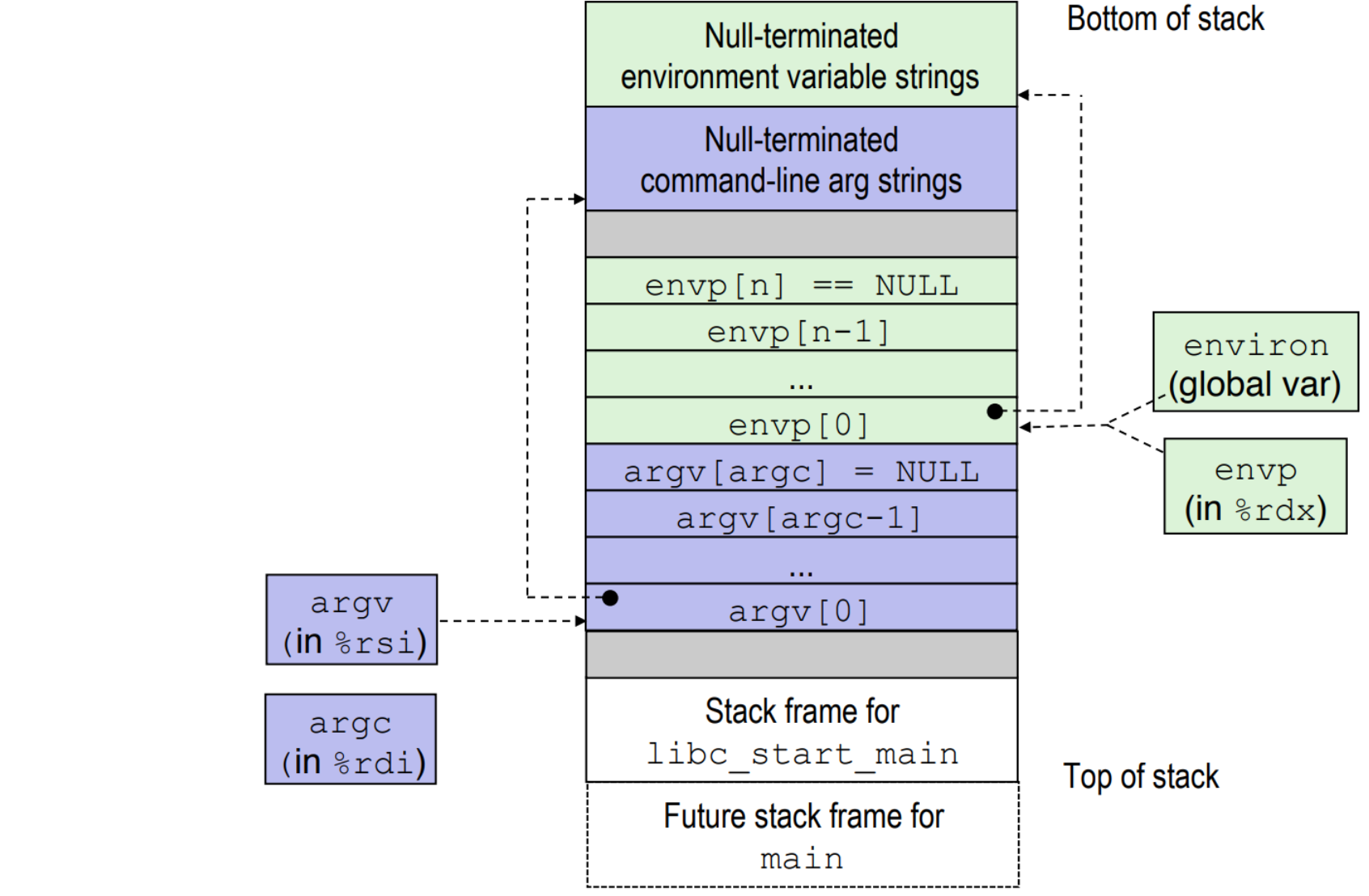
The arguments of execve is compatible with the structure of the stack.
Example of Executing /bin/ls -lt /usr/include

We executes /bin/ls -lt /usr/include in child process using current environment.
Code:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <errno.h>
#include <string.h>
void unix_error(char *msg) {
fprintf(stderr, "%s: %s\n", msg, strerror(errno));
exit(0);
}
int Fork() {
int pid;
if ((pid = fork()) < 0) {
unix_error("Fork error");
}
return pid;
}
int main(int argc, char *argv[]) {
char *environ[] = { NULL };
int pid;
for (char **argv_ptr = argv; *argv_ptr != NULL; ++argv_ptr) {
printf("Argv[%ld]: %s\n", argv_ptr - argv, *argv_ptr);
}
printf("\n" "We will execute %s with\n", argv[1]);
for (char **argv_ptr = argv + 1; *argv_ptr != NULL; ++argv_ptr) {
printf("Argv[%ld]: %s\n", argv_ptr - argv, *argv_ptr);
}
printf("\n");
if ((pid = Fork()) == 0) {
if (execve(argv[1], argv + 1, environ) < 0) {
printf("%s Command not found.\n", argv[1]);
exit(1);
}
}
return 0;
}
Bash Command Line:
Output:
Argv[0]: ./execve
Argv[1]: /bin/ls
Argv[2]: -lt
Argv[3]: /usr/include
We will execute /bin/ls with
Argv[1]: /bin/ls
Argv[2]: -lt
Argv[3]: /usr/include
total 4052
drwxr-xr-x 1 root root 4096 Jan 12 10:08 c++
drwxr-xr-x 2 root root 4096 Dec 8 04:57 gnutls
drwxr-xr-x 2 root root 4096 Dec 8 04:57 libexslt
... (omitted)
-rw-r--r-- 1 root root 2590 Jan 14 2019 uodbc_stats.h
-rw-r--r-- 1 root root 6893 Aug 6 2018 FlexLexer.h
-rw-r--r-- 1 root root 2912 Jul 28 2018 gnumake.h
-rw-r--r-- 1 root root 16767 Dec 27 2017 argon2.h