Lec 15: Signals and Nonlocal Jumps¶
Shells¶
There's only one way to create process in Linux: fork call. And it create a subprocess of the current process.
So, there's a process hierarchy in Linux
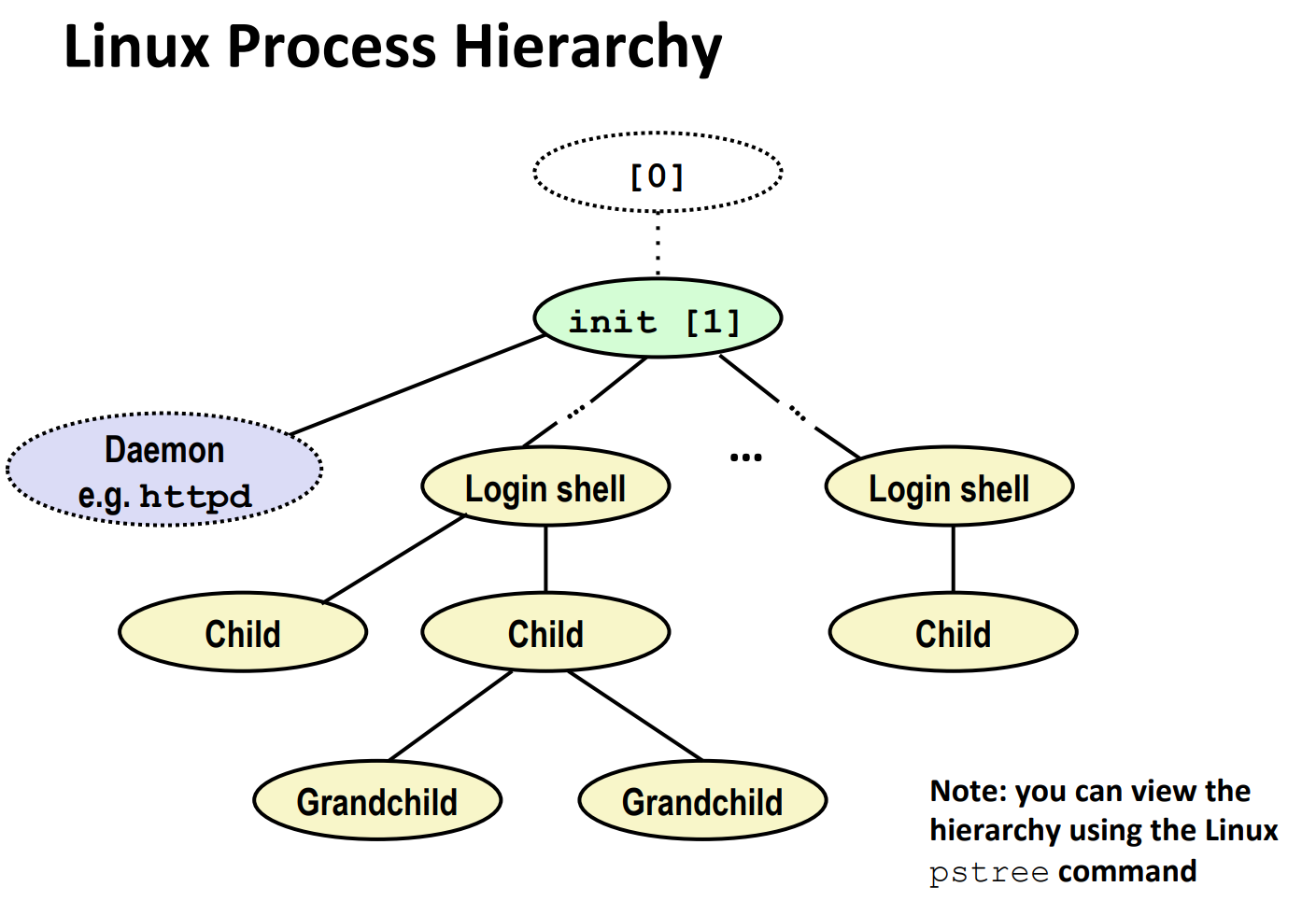
"Init" process creates "Daemon" and "Login shell"s. "Shell"s create their children, grandchildren, and so on.
Shell Programs¶
A shell is an application program that runs programs on behalf of the user.
A (not 100% correct) implementation of a simple shell:
void eval(char *cmdline)
{
char *argv[MAXARGS]; /* Argument list execve() */
char buf[MAXLINE]; /* Holds modified command line */
int bg; /* Should the job run in bg or fg? */
pid_t pid; /* Process id */
strcpy(buf, cmdline);
bg = parseline(buf, argv);
if (argv[0] == NULL)
return; /* Ignore empty lines */
if (!builtin_command(argv))
{
if ((pid = Fork()) == 0)
{ /* Child runs user job */
if (execve(argv[0], argv, environ) < 0)
{
printf("%s: Command not found.\n", argv[0]);
exit(0);
}
}
/* Parent waits for foreground job to terminate */
if (!bg)
{
int status;
if (waitpid(pid, &status, 0) < 0)
unix_error("waitfg: waitpid error");
}
else
printf("%d %s", pid, cmdline);
}
return;
}
As you see, the only difference between background processes and foreground processes is whether to wait or not.
But wait, there's a problem: the background processes might become zombies if not reaped in time. So, how to reap them without wait or waitpid?
It turns out that we can use a kind of ECF to fix this - signals!
Signals¶
A signal is a small message that notifies a process that an event of some type has occurred in the system
- akin to exceptions and interrupts
- sent from the kernel (sometimes at the request of another processes) to a process
- signal types is identified by small integer ID's (1-30)
- Only information in a signal is
- its ID
- and the fact that it arrived
| ID | Name | Default Action | Corresponding Event |
|---|---|---|---|
| 2 | SIGINT | Terminate | User typed ctrl-c |
| 9 | SIGKILL | Terminate | Kill program (cannot override or ignore) |
| 11 | SIGSEGV | Terminate | Dump Segmentation violation |
| 14 | SIGALRM | Terminate | Timer signal |
| 17 | SIGCHLD | Ignore | Child stopped or terminated |
Signal Concepts¶
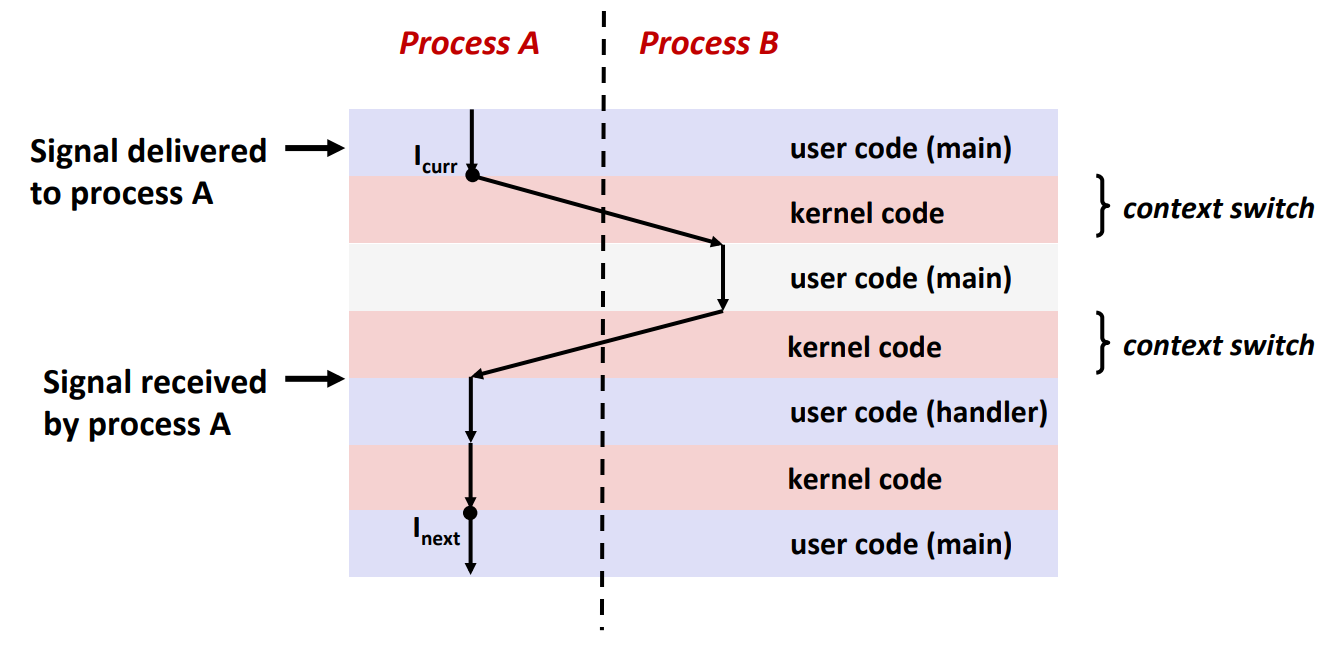
The kernel sends (delivers) a signal to a destination process by updating some state in the context of the destination process.
The signal is delivered for one of two reasons:
- The kernel has detected a system event such as a divide-by-zero (SIGFPE) or the termination of a child process (SIGCHILD).
- A process has invoked the
killfunction (discussed in the next section) to explicitly request the kernel to send a signal to the destination process. - Note: A process can send a signal to itself.
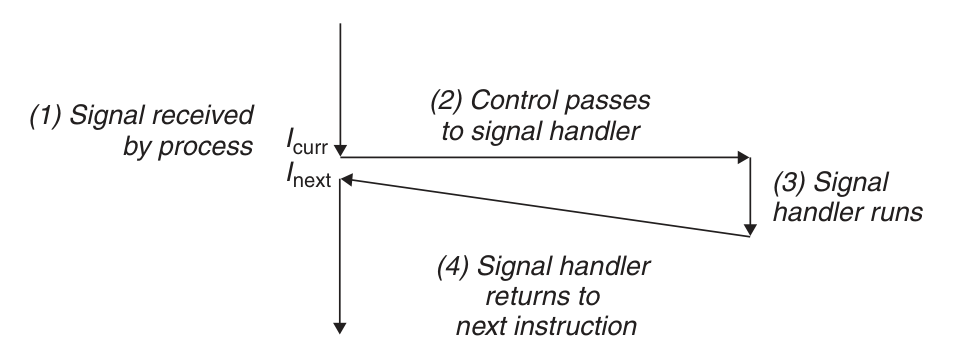
A destination process receives a signal when it is forced by the kernel to react in some way to the delivery of the signal.
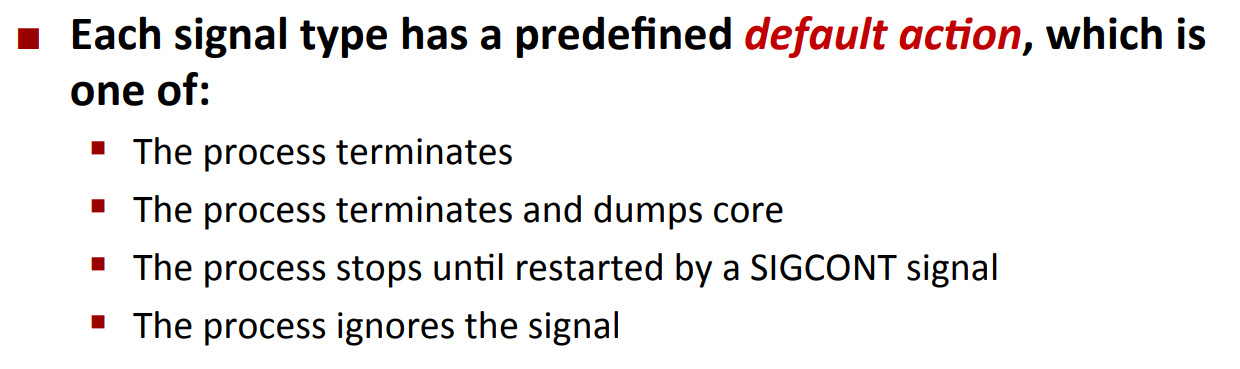
Some possible ways to react:
- Ignore the signal
- Terminate the process
- Catch the signal by executing a user-level function called signal handler
Pending and Blocked Signals¶
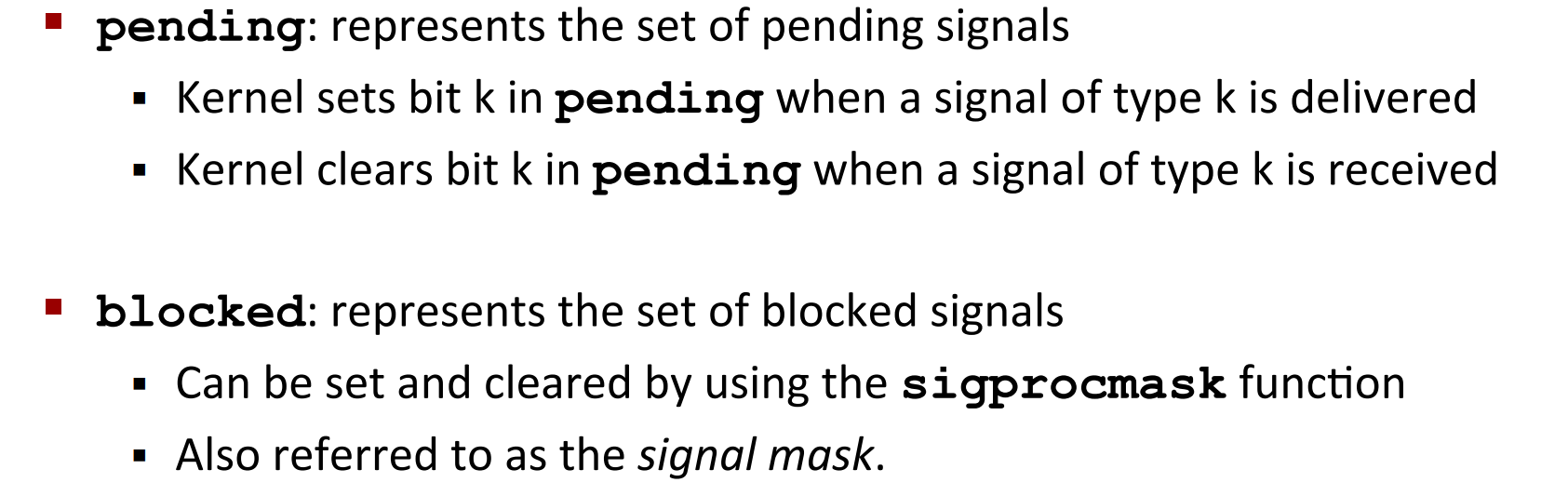
A signal is pending if sent but not yet received.
- There can be at most one pending signal of any particular type
- That is, other signals of the same type will get discarded
A process can block the receipt of certain signals
- Blocked signals can be delivered (i.e. sent), but can't be received till the signal gets unblocked
In fact, kernel maintains pending and blocked bit vectors in the context of each process.
Process Groups¶

How to Send Signals?¶
You can send signals by three ways:
-
/bin/killprogram -

-
From the keyboard
-
Examples of Ctrl-C and Ctrl-Z
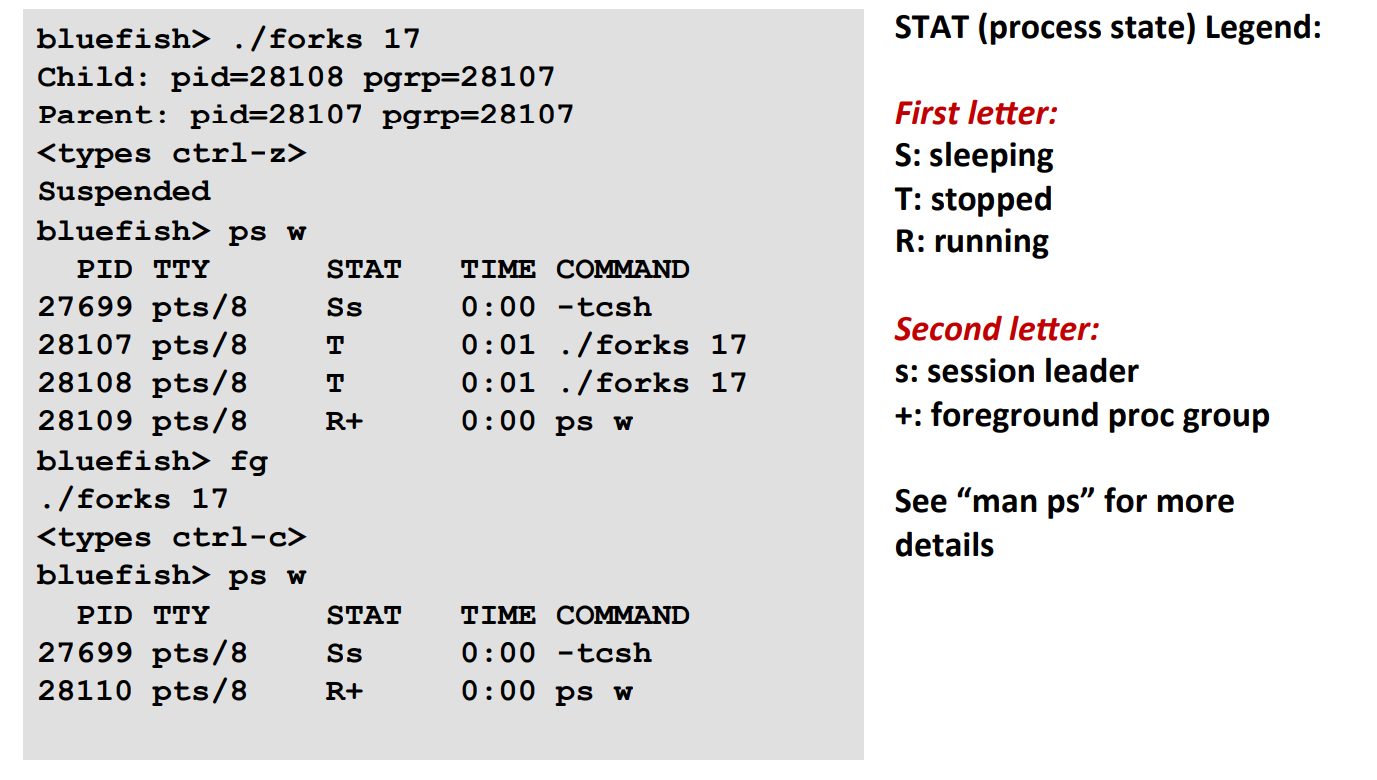 Note that Ctrl-C and Ctrl-Z send
Note that Ctrl-C and Ctrl-Z send SIGINTandSIGTSTPto all processes belonging to foreground process group. -
killfunction
void fork12()
{
pid_t pid[N];
int i;
int child_status;
for (i = 0; i < N; i++)
if ((pid[i] = fork()) == 0)
{
/* Child: Infinite Loop */
while (1);
}
for (i = 0; i < N; i++)
{
printf("Killing process %d\n", pid[i]);
kill(pid[i], SIGINT);
}
for (i = 0; i < N; i++)
{
pid_t wpid = wait(&child_status);
if (WIFEXITED(child_status))
printf("Child %d terminated with exit status %d\n",
wpid, WEXITSTATUS(child_status));
else
printf("Child %d terminated abnormally\n", wpid);
}
}
How to Receive Signals?¶
- Suppose kernel is returning from an exception handler and is ready to pass control to process
B.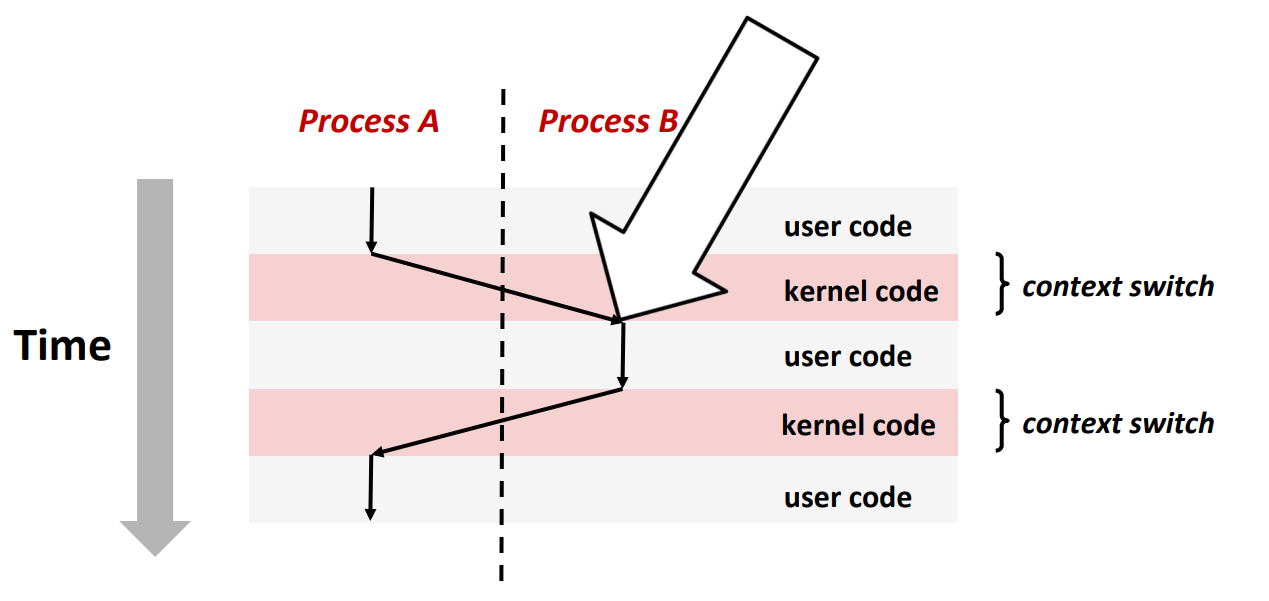
- Recall: Why "returning from an exception handler"? Because all context switches are initiated by calling some exception controller.
- The kernel will compute
pnb = pending & ~blocked - If
pnb == 0, just pass control to next instruction in the logical flow forp - Else
- choose least nonzero bit \(k\) in
pnband forcepto receive signal \(k\) - The receipt of signal \(k\) triggers some action by
p - Repeat for all nonzero \(k\) in
pnb - Finally, pass control to next instruction in the logical flow for
p
Default Actions¶
Installing Signal Handlers¶
If we want to modify the action, we have to use the signal function.
Signal as Concurrent Flow¶
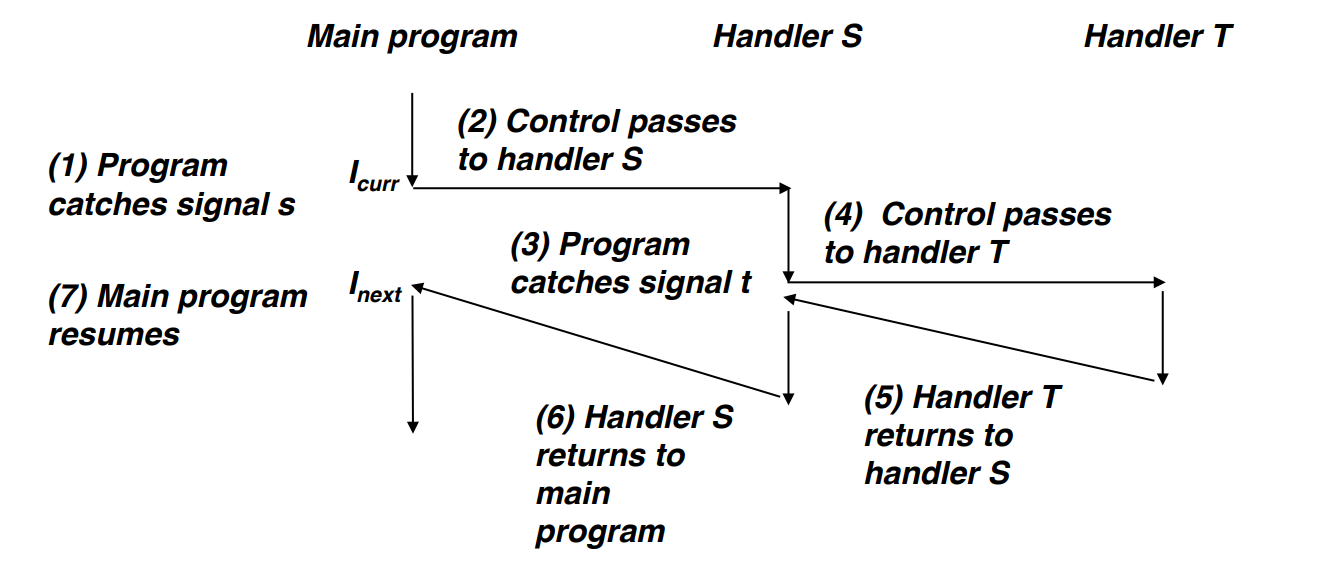
Nested Signal Handlers¶
How Signals Get Blocked?¶
sigset_t mask, prev_mask;
Sigemptyset(&mask);
Sigaddset(&mask, SIGINT);
/* Block SIGINT and save previous blocked set */
Sigprocmask(SIG_BLOCK, &mask, &prev_mask);
/* Code region that will not be interrupted by SIGINT */
/* Restore previous blocked set, unblocking SIGINT */
Sigprocmask(SIG_SETMASK, &prev_mask, NULL);
- Note: capitalized function is the wrapped function
Safe Signal Handling¶
There are three factors that might make your program unsafe:
- They might form deadlocks
- Since signals of the same kind aren't queued, you can't use them to count events.
- They are not portable across different Linux dists
Guidelines¶
- G0: Keep your handlers as simple as possible
-
e.g., Set a global flag and return (recommended by CMU cert guideline)
-
G1: Call only async-signal-safe functions in your handlers
-
printf,sprintf,malloc, andexitare not safe! -
G2: Save and restore
errnoon entry and exit -
So that other handlers don't overwrite your value of
errno -
e.g.
-
G3: Protect accesses to shared data structures by temporarily blocking all signals.
-
To prevent possible corruption e.g. when you are making changes to list, a signal is detected, and it also reads/writes the invalid list
-
G4: Declare global variables as
volatile -
To prevent the compiler from storing them in a register
-
G5: Declare global flags as
volatile sig_atomic_t flag: variable that is only read or written (e.g.flag = 1, notflag++)- Flag declared this way does not need to be protected like other globals
- Note: usually
sig_atomic_tis an alias ofint
Async Signal Safety¶
Function is async-signal-safe if either reentrant (e.g.,all variables stored on stack frame,CS:APP3e 12.7.2) or non-interruptible by signals.
POSIX guarantees 117 functions to be async-signal-safe
Popular functions on the list:
- _exit
- write
- wait
- waitpid
- sleep
- kill
Popular functions that are not on the list:
- printf
- sprintf
- malloc
- exit
Unfortunate fact: write is the only async-signal-safe output function.
Sidenote: the reason why printf is not ASS is that it has a "lock" which isn't on stack frame, thus not reentrant and might cause deadlock (say, printf is interrupted by a signal whose handler also calls printf).
Synchronizing Flows to Avoid Races¶
There's a potential races between the parent and the child in the code below:
void handler(int sig) {
int olderrno = errno;
sigset_t mask_all, prev_all;
pid_t pid;
Sigfillset( & mask_all);
while ((pid = waitpid(-1, NULL, 0)) > 0) {
/* Reap child */
Sigprocmask(SIG_BLOCK, & mask_all, & prev_all);
deletejob(pid); /* Delete the child from the job list */
Sigprocmask(SIG_SETMASK, & prev_all, NULL);
}
if (errno != ECHILD)
Sio_error("waitpid error");
errno = olderrno;
}
int main(int argc, char ** argv) {
int pid;
sigset_t mask_all, prev_all;
Sigfillset( & mask_all);
Signal(SIGCHLD, handler);
initjobs(); /* Initialize the job list */
while (1) {
if ((pid = Fork()) == 0) {
/* Child */
Execve("/bin/date", argv, NULL);
}
Sigprocmask(SIG_BLOCK, & mask_all, & prev_all); /* Parent */
addjob(pid); /* Add the child to the job list */
Sigprocmask(SIG_SETMASK, & prev_all, NULL);
}
exit(0);
}
也就是说,可能会由这样的情况:
Fork()之后,kernel 进行上下文切换,并直接执行完了 child- 然后再进行上下文切换。假设直接回到了
main()函数,那么 SIGCHILD 就会触发 handler,并删除了一个不存在的 PID - 然后 kernel 再回到
main()的 next instruction,并执行了addjob(pid)。 - 从而,这个 PID 永远不可能被删除了,造成了我们不希望出现的结果。
我们可以 slightly fix the program,使得两者 synchronize:
// handler
// ...
int main(int argc, char ** argv) {
int pid;
sigset_t mask_all, mask_one, prev_one;
Sigfillset( & mask_all);
Sigemptyset( & mask_one);
Sigaddset( & mask_one, SIGCHLD);
Signal(SIGCHLD, handler);
initjobs(); /* Initialize the job list */
while (1) {
Sigprocmask(SIG_BLOCK, & mask_one, & prev_one); /* Block SIGCHLD */
if ((pid = Fork()) == 0) {
/* Child process */
Sigprocmask(SIG_SETMASK, & prev_one, NULL); /* Unblock SIGCHLD */
Execve("/bin/date", argv, NULL);
}
Sigprocmask(SIG_BLOCK, & mask_all, NULL); /* Parent process */
addjob(pid); /* Add the child to the job list */
Sigprocmask(SIG_SETMASK, & prev_one, NULL); /* Unblock SIGCHLD */
}
exit(0);
}
如上,我们通过 Sigprocmask(SIG_BLOCK, & mask_one, & prev_one); 将 SIGCHILD 信号在添加 child process 之前就进行了阻塞,保证不会出现 SIGCHILD 在 addjob 之前就被 receive。
我们在 addjob 和子进程里面进行了 unblock。保证在 addjob 之后,SIGCHILD 可以顺利被处理;同时,由于子进程继承了父进程的 block mask,我们要将子进程也恢复如常。
Rule of Thumb: fork 的瞬间,你就要考虑 asynchrony,也就是父进程和子进程之间的执行顺序可以任意。从而,你需要添加信号阻塞等等,避免出现 race 的情况。
Explicitly Waiting For Signals¶
我们之前都是 implicitly wait for signals(也就是我们持续执行进程,有 signal 来了再打断),现在,我们希望 explicitly wait for signals(也就是我们停下来等待,直到有 signal 来了,再处理 signal,再继续执行)。
(详见 csapp lec 15 pdf P40-44)
tl;dr: use sigprocmask(<signal that you want to wait for>)
sigprocmask就是原子化(i.e. 不可能被打断的):